Pictures
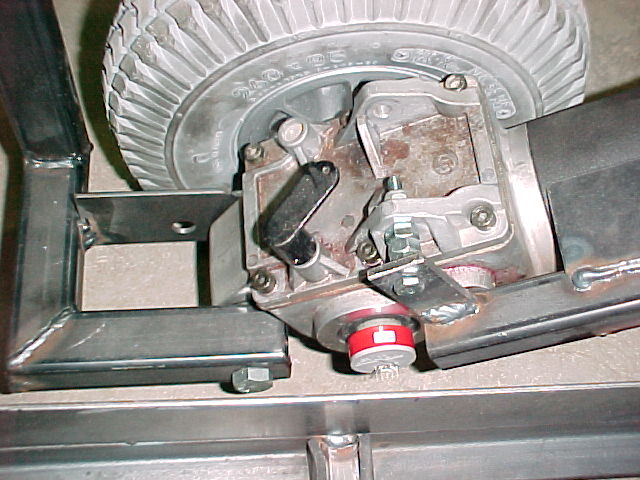
Motor and encoder
{kind=link}
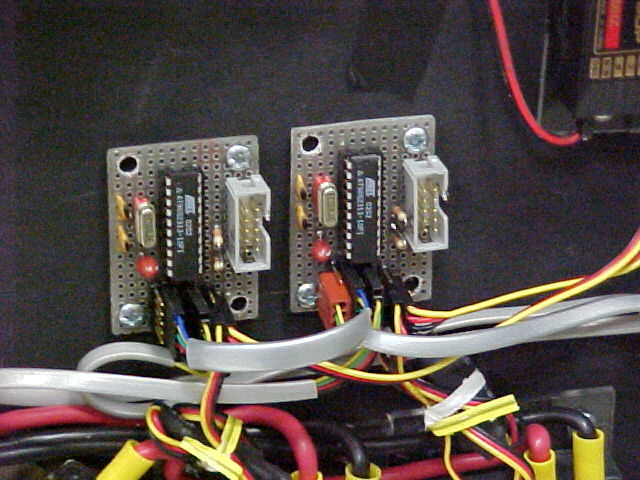
Atmel Servo boards There is more information under "Atmel" on the left
{kind=link}
Map screen
Control software
Ultrasonic Multifrequency Chirp sensor
Pictures
Motor and encoder
Atmel Servo boards There is more information
under "Atmel" on the left
Map screen
Control software
Ultrasonic Multifrequency Chirp sensor
Task
The challenge is to unload the bot and have it find it's way to the class
room.
The path can be programed or learned step by step.
1. At parking lot handy cap ramp
2. Push handicap button and Enter elevator area
4. Press elevator button to go up and enter elevator when it arrives
6. Press lobby level and count the dings that the elevator makes when
changing floors.
8. Leave elevator and go down hall to lobby entrance
9. Press handicap button. and go across lobby
10. Go to internal elevators.
11. Press button to go down and enter elevator when it arrives
12. Press level 2 button and count the dings that the elevator makes
when changing floors.
13. Exit elevator. and go around corner.
14. Go around room with strange ceiling into next hallway.
15. Go down colorful hallway to classroom area lobby.
16. Which room? (Stop here)
There are enough green exit signs so that there are at least one visible
at all times.
So I plan on using a simple find green and calculate angles to help keep
the bot's position accurate.
The robot itself is designed as a 19 inch rack on wheels.
The base has 130 pounds of batteries to keep it from tipping over.
It has six wheels. Four swivel casters and two drive wheels.
The casters are spring loaded and move up and down on slides.
The main drive wheels are also spring loaded and slides up and down.
It has 21 inches of rack area. (Three 4U rack cases)
There is a keyboard and monitor on the top.
The cameras will mount on a retractable pole.